近日,北斗第 55 颗卫星完成在轨测试,正式入网。
信息化时代,卫星导航系统不仅在国家信息安全领域有重要意义,在商业应用方面也举足轻重。北斗三号具备导航定位和通信数传两大功能,据了解,北斗系统全球范围定位精度优于 10 米、测速精度优于 0.2 米 / 秒、授时精度优于 20 纳秒、全球服务可用性 99%以上。
中国卫星导航定位协会发布的《中国卫星导航与位置服务产业发展白皮书(2020)》显示,北斗对导航与位置服务产业的核心产值贡献率超过 80%。随着北斗系统的全面建成开通,GNSS高精度定位技术成为大众关注的问题。
在交通和自动驾驶领域的快速发展趋势下,GNSS 高精度应用需求加速释放。
智能驾驶为什么需要 GNSS 高精度定位?
众所周知,自动驾驶是一个非常复杂的技术实现过程,随着汽车智能化的提升,对于功能、安全、责任方面的需求日益增加。车辆不仅要知道自己的位置,还要知道周围车辆的位置和道路环境情况。
实现高度自动驾驶需要突破厘米级导航定位、环境感知、决策控制、路径规划等技术瓶颈。从目前车载定位技术现状来看,其在可用性、安全性、成本等方面存在较多问题。
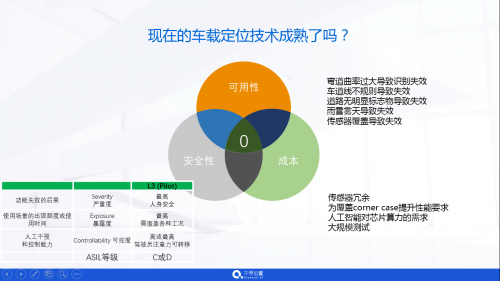
图源:千寻位置(点击图片,可看高清大图,下同)
因此,面对车载定位技术的种种瓶颈,以及车辆对定位精度和功能安全需求的日益严格,GNSS 定位技术变得愈发不可或缺。
GNSS 定位也从单 GPS 卫星定位 -传感器融合(DR)- 多频多卫星,到单频 RTK- 多频 RTK 等方向优化和发展,提高功能安全性保障。
GNSS 高精度定位的优势与趋势
GNSS(全球导航卫星系统)技术,是通过捕获来自中国北斗、美国 GPS、欧盟 GALILEO、俄罗斯 GLONASSA 等多个不同卫星系统的卫星,有效卫星数的提升可以大幅提高定位的精度和稳定性。
其中,美国的 GPS 凭借其“先行者”的优势,一直占据着世界前列的位置。基于 GPS 近乎垄断的地位,中国一直以来都希望建设属于自己的卫星系统,实现“卫星自由”。
北斗导航卫星在国内科研人员走了 23 年的艰苦历程后,完成了从依赖他国技术到完成自主研发占领科技高地的蜕变。近日正式完成全球组网之后,成为了第四个拥有独立的全球导航定位系统的国家。
GNSS 高精度定位的优势
那么,GNSS 能提供什么?GNSS 更多提供的是车道级,高可靠性、高完整性的位置信息,GNSS 独特的特点是提供的位置信息是绝对位置,不是相对位置。提供绝对的 UTC(国际协调时间),绝对的车速以及绝对的航向信息。

图源:千寻位置
这一特点的好处是,在任何的前提条件下或雨雪雾环境中都可以提供信息,可以在更小的范围内进行地图匹配,降低地图匹配所需的算力,进而降低地图成本。同时可以为其他传感器提供很好的支撑, 共同协作,达到功能安全。
具体来看,GNSS 高精度定位可从多个方面为自动驾驶汽车赋能,比如提升感知系统的稳定性和可靠性。目前主流的自动驾驶传感器,如摄像头、亳米波雷达、激光雷达,虽然具备相对定位能力,但由于它们在实际应用过程中均有各自的缺陷,导致这些传感器的定位能力会随之受到天气、环境、地形等各因素的影响

图源:千寻位置
比较之下,GNSS 高精度定位技术可以避免受到外界因素干扰,即使在恶劣天气、非视距场景和其他车载传感器弱卫星信号覆盖下,依旧能够为自动驾驶汽车提供精准、稳定、可靠的定位信息,帮助车辆判断当前所处位置,从而对目前的环境进行整体认知,便于车辆进行下一步的決策。
然而,在 GNSS 高精度定位众多优势之余,也存在其不足之处——在城市、隧道及天桥等遮挡环境下表现较差。
对此,GNSS 定位技术可以通过与 DR(惯性导航)、RTK(载波相位差分)等不同定位技术融合来避免受到外界因素干扰,
即使在恶劣天气、非视距场景和其他车载传感器弱卫星信号覆盖下,依旧能够为自动驾驶汽车提供精准、稳定、可靠的定位信息,帮助车辆判断当前所处位置,从而对目前的环境进行整体认知,便于车辆进行下一步的決策。
惯性导航技术(DR)
GNSS 卫星定位虽然方便,但容易受客观条件的影响。例如隧道、森林等路段,GNSS 信号容易中断。此时,就需要临时采用其它的辅助手段。
DR(Dead Reckoning,航位推算)就是一种自主式的惯性导航技术。该技术结合了 GNSS 和传感器信息,通过采用加速度传感器和陀螺仪传感器,结合航位推算专用算法,可以根据车辆的初始位置信息以及传感器获得的信息,可有效的优化多径效应带来的定位偏移,推算出用户终端在盲区位置的高精度导航数据。
载波相位差分技术(RTK)
RTK(Real-time kinematic),称为载波相位差分技术,又称为实时动态差分法,是实时处理两个测量站载波相位观测量的差分方法,包括传统 RTK 和网络 RTK。
RTK 定位原理为:GNSS 接收机接收卫星信号,通过基准站基于载波相位差分技术计算公共误差并发送到云端,然后 GNSS 接收机利用卫星的载波相位观测值和云端接收的修正数据计算出精确到厘米级的定位结果。
RTK 原理
不仅如此,通过将 GNSS 高精度定位和摄像头、高精雷达等融合应用,还可以实现很好的感知冗余。GNSS 高精度定位服务与智能摄像头等传感器形成多重冗余,使得车辆在行驶过程中遇到车道线不规则、车道线短暂覆盖、道路无明显标志物、弯道曲率过大等情況,而相对定位方案又失效的时候,仍然可以继续为车辆提供环境感知支持。
总结一下,目前没有一种传感器能够在任何时间、任何地点都能获得一个准确的位置信息。当前车辆进行高精度定位除了基于视觉摄像头等车载传感器进行相对定位,还要借助高精度 GNSS、蜂窝网定位、高精度惯导测量单元(IMU)和 RTK、高精地图等技术来实现。
多径效应何解?
遮挡环境中表现较差之外,多径效应也是 GNSS 定位的主要影响因素之一。
多径效应:理想状态下,卫星信号将沿最短路径直接达到接收机天线。而如果天线附近有反射物,接收机天线几乎同时收到卫星的直接信号与反射信号,两种信号的叠加将使观测值产生附加时延量,使得定位设备所接收到的卫星信号还包含各种反射和折射信号的影响,这就是多径效应。
那么,应该如何解决这一问题,降低多径效应对测量精度的影响?
一般来说,上述 DR 惯性导航技术可有效优化多径效应带来的定位偏移之外,多频段 / 双频技术也可以有效抑制城市环境中的多径效应,削弱大气层误差,提高定位精度。
所谓双频,就是 GNSS 模组同时支持多个不同 GNSS 系统的不同频段,以此增强信号的接收能力。目前全球卫星导航的一个显著的特点是由单频单系统向多频多系统转变,逐渐提升导航系统的可靠性与可用性。
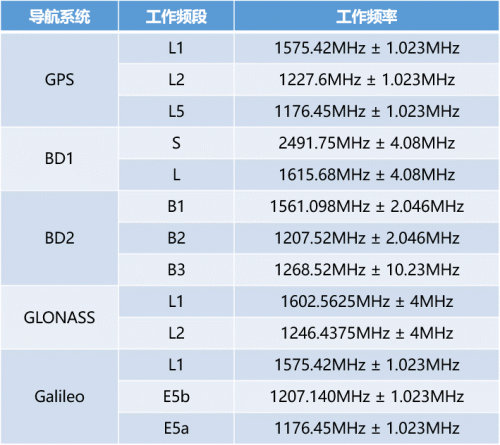
GNSS 系统频段
对于 GNSS 高精度定位市场的发展趋势,移远通信 GNSS 产品总监宋铁理强调,“随着国家政策扶持和产业链共同推广,未来三年内,中国市场 70%的定位类应用都会转到双频和高精度市场,GNSS 高精度定位模组的价格也会逐渐下降。”
写在最后
据 GSA 数据统计,未来十年全球 GNSS 设备出货量将持续增长,从 2019 年的 18 亿台预计增长至 2029 年的 28 亿台。
事实上,在逐渐成型且庞大的自动驾驶产业体系中,高精度定位的作用已被广泛认识。
经过数十年的发展,GNSS 系统从当初的 GPS 一家独大,到现在变成 GPS、北斗、GLONASS、GALILEO 等多系统共存,取得了长足的进步。如今的 GNSS 系统,已经具备提供全方位、全天候、高精度、高速率定位导航服务的能力。
随着 GNSS 融合定位技术的快速发展,支持 GNSS、DR 和 RTK 等融合定位技术,进一步提高了定位精度,为未来高精度 GNSS 定位提供了有力的技术支持,也正在逐渐成为自动驾驶领域最主流的高精度定位方式。