自然界生物通过感知外界环境变化并调节自身运动模式从而能够更好地在周围环境中生存,例如能够感知被抓取物体的形态和压力,并据此来调整运动的程度以准确抓握物体并避免对自身的伤害。就人体而言,实现这一功能主要是通过皮肤和肌肉的协作配合,皮肤可及时准确感知外界刺激,肌肉对其做出相应的驱动反应。受到这些功能的启发,人们致力于利用各种软材料来模仿构建这种兼具传感和驱动功能的材料。水凝胶驱动器可在多种外界刺激下自发产生形变,具有良好的生物可容性,且对环境友好,在软体机器人方面具有广泛的应用前景。虽然目前已经报道了大量具有不同形变模式的水凝胶驱动器,但是这类材料通常仅具备驱动功能,驱动过程不能实现及时的数字化检测与反馈,限制了其进一步发展。
近年来,中国科学院宁波材料技术与工程研究所智能高分子材料课题组陈涛研究员与张佳玮研究员一直致力于智能变形水凝胶的研究(Chem. Commun. 2018, 54, 1229; Adv. Funct. Mater. 2018, 28, 1704568; Adv. Sci. 2019, 6, 1801584; Research 2019, 2384347; Angew. Chem. Int. Ed., 2019, 58, 16243; Angew. Chem. Int. Ed., 2020, 59, 19237; Small 2020, 2005461等),同时在柔性传感器研究方面也有多年的积累(J. Mater. Chem. C, 2018, 6, 6666; J. Mater. Chem. C, 2018, 6, 5140; Chem. Mater., 2018, 30, 4343; J. Mater. Chem. A, 2019, 7, 26631; ACS Nano, 2019, 13, 4368; Nano Energy, 2019, 59, 422; Adv. Mater., 2020, 2004290; Nat. Commun., 2020, 11, 4359等)。近期受到人体皮肤和肌肉协同工作的启发,开发了一种具有自传感功能的软驱动器。

图1 (a)受皮肤和肌肉启发的驱动传感一体化CNTs-Ecoflex/PNIPAm水凝胶部件图示;(b)CNTs-Ecoflex/PNIPAm水凝胶部件的构建过程与结构示意图
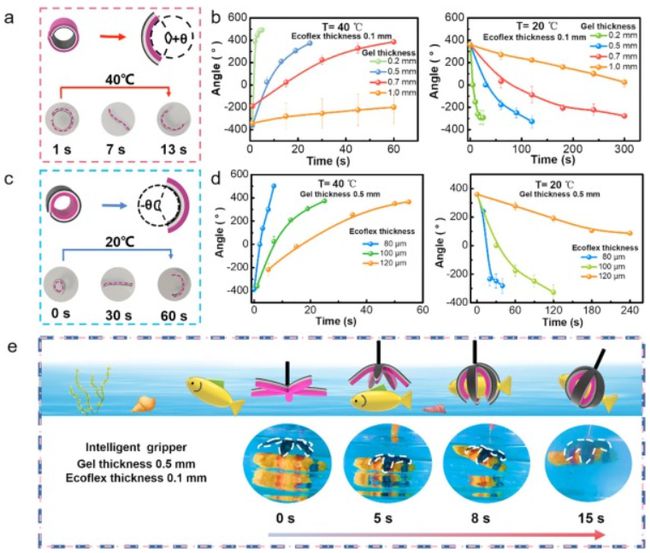
该工作通过将聚N-异丙基丙烯酰胺(PNIPAm)水凝胶与超薄的Ecoflex弹性体/碳纳米管(CNTs)Janus膜集成为一个三层复合结构以模仿肌肉与皮肤的协作功能。以PNIPAm水凝胶的温度响应收缩与膨胀模仿肌肉的驱动行为,通过导电的Ecoflex/CNTs膜模仿皮肤的感知功能。同时借助CNTs的光热转换能力,当近红外光照射时,PNIPAm水凝胶温度升高,从而发生收缩形变。由于Ecoflex/CNTs膜不能在近红外光照射下发生形变,驱动器为各向异性驱动,整体向PNIPAm水凝胶侧弯曲,根据压阻传感机理,驱动器的形变会引起碳纳米管导电网络间接触电阻的变化,从而实现利用电信号对变形功能的实时监测。根据监测结果,可以得知驱动程度并据此控制近红外光照射时间,从而调控材料的变形行为。研究人员将该驱动器与其他机械部件结合,设计了可在近红外光照射下抬起的模拟手臂和能抓取不同大小物体的机械抓手。在机械抓手抓取不同大小物体过程中,可通过电信号的反馈比较物体的大小并调节近红外光照射的时间与强度。该工作成功地将传感与驱动功能集成到一个三层复合结构中,实现了驱动传感一体化,为开发新型智能集成软机器人提供了新思路。
该工作以题为“symmetric bilayer CNTs-elastomer/hydrogel composite as soft actuators with sensing performance”的论文发表在Chemical Engineering Journal(2021, 415, 128988)。本研究得到了国家自然科学基金(51873223、52073295),中国科学院青年创新促进会(2017337),海洋新材料与应用技术重点实验室开放基金(2020K05),宁波自然科学基金(202003N4359)等项目的支持。