目前全球定位系统(GPS)在世界范围内的覆盖率高达98%。在实际生活中,利用GPS对通行的火车和车辆实时定位尤为重要,但由于隧道以及城市峡谷效应降低了卫星能见度,从而导致GPS无法准确的定位。而分布式声学传感系统(DAS)对光纤沿线的应变变化十分敏感并且安装在地下光纤上,可以避免隧道以及城市峡谷效应所导致的问题。DAS的基本原理就是分布式声学传感器询问单元将激光脉冲传输到光纤中,这种光脉冲沿光纤传播时,光纤内的相互作用产生后向传输的瑞利散射光,当光纤受到外界扰动后,其后向瑞利散射光的光强就会发生变化。所以当街道级干扰如火车、车辆通行以及建筑施工等使DAS光纤受到局部应变时,其后向散射光的光强也会发生变化,根据这些光强的峰值强度就可以测得它们所在的位置以及速度。基于此原理,加拿大卡尔加里大学的Robert J. Ferguson研究团队提出利用DAS系统定位火车来代替GPS定位,或者与GPS系统共同运作。
作者将DAS系统安装到卡尔加里市南北方向的轨道沿线的通讯光纤上,如图1所示,南北方向的轨道为图中红色的线。轨道上运行的火车会使沿线光纤受到应变从而导致散射光强发生变化,通过跟踪DAS声场中强度峰值的变化,可以得到运行火车在市政厅站(始发站)和托斯卡纳站(终点站)间的走过的DAS距离(dDAS)。

图1 卡尔加里市轻轨系统地图
图源:Journal of Applied Geophysics (2020).
但由于DAS系统安装在埋于地下1m的通讯光纤中,沿着轨道的通讯光纤偶尔会有弯折,如图2所示。由于这些弯折导致光纤的长度大于轨道的长度,使DAS系统定位不准确,所以作者提出建立沿光纤的距离与轨道的经纬度之间的对应关系,其中轨道的经纬度是由GPS定位得到。同时,为更加准确的利用进行经纬度定位,作者将GPS定位转换成GPS距离(dGPS),并且将卡尔曼滤波后的dGPS和dDAS与车速表记录的数据位于同一坐标系中,其中经过卡尔曼滤波的dGPS、dDAS分别定义为kGPS、kDAS。然后将kGPS东西方向和南北方向的距离分别转化为经度θk和纬度λk。作者选择装有GPS系统的4节车厢的测试火车,并用DAS系统来记录这三趟行程中每节车厢的kDAS。
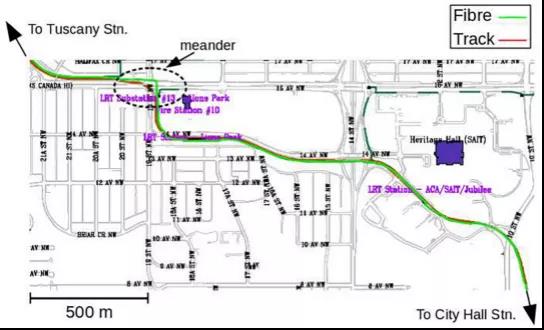
图2 卡尔加里市电信光纤地图
图源:Journal of Applied Geophysics (2020).
通过分析可得,三次行程中的第一次行程的噪声最小,这与乘客量以及道路交通量有关,并且测试火车的前两节车厢在DAS声场中的强度最大。由此作者利用第一次行程中的前两节车厢得到的经纬度以及kDAS数据定义了一个三维分量[kDAS,
λk, θk],这为火车定位提供了一组查找表。如图3所示,每个kDAS直接与唯一的[λk,
θk]位置相对应,而与时间无关。只要光纤和轻轨线保持静止,就可以对运行火车进行实时定位。最后,作者测得运行火车的定位精度为南北方向±30 m,东西方向±60
m。
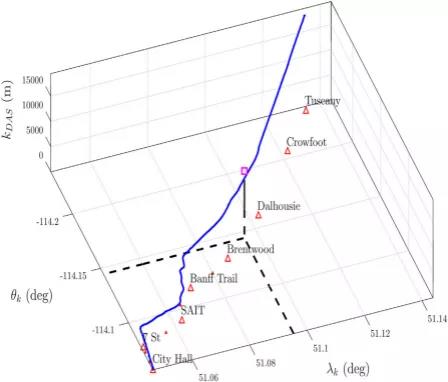
图3 距离kDAS与位置[λk, θk]关系
图源:Journal of Applied Geophysics (2020).