机械手是安装在机器人末端的执行器,从操作对象来分类机械手可分为简单机械手和灵巧机械手。
简单机械手通常自由度少,被广泛应用于工业场景中的工件夹取任务。而灵巧机械手具有多自由度,集成了更丰富的传感器,可适用于更多复杂形状物体的抓取和操作任务。
但是,传统的灵巧机械手在空间运动时,会遇到运动冗余以及奇异问题。为了使得机械手在空间能够产生多自由度的运动的同时避免奇异点,近日,哈佛大学机械工程专业博士生康纳·麦肯(Connor M. McCann)等人提出一种新型的六自由度灵巧机械手,并进行了相关的抓取实验测试,让机械手可轻松实现抓取积木塞入木盒中等操作。

动图 | 机械手执行木块插入任务(来源:IEEE Robotics & Automation Magazine)
相关研究论文发表于机器人期刊 IEEE Robotics & Automation Magazine 上,题目为《基于 Stewart-Gough 平台的高度灵巧、六自由度机械手》(The Stewart Hand: A Highly Dexterous, Six-Degrees-of-Freedom Manipulator Based on the Stewart-Gough Platform)。

图 | 相关论文(来源:IEEE Robotics & Automation Magazine)
早在 1955 年,斯图尔特·高夫(Stewart Gough)等人就提出六自由度 Gough-Stewart 平台,并将其首次应用在轮胎检测系统。而在 1965 年,英国学者 D. 斯图尔特(D. Stewart)基于这种结构,在 SAGE Journals 出版社旗下的 Proceedings of the Institution of Mechanical Engineers 期刊上发表了论文《六自由度平台》(A Platform with Six Degrees of Freedom)。

图 | 机械手抓取不同形状的物体以插入盒子 (来源:IEEE Robotics & Automation Magazine)
同时为了纪念高夫对此平台的贡献,现在一般称这种平台为 Gough-Stewart 平台。Gough-Stewart 并联平台相比于串联平台,拥有高精度、大刚度、高承载能力、运动惯性小、动态特性好等特点,因此被广泛地应用于各种定位平台、并联机床、隔振平台、工业机器人、以及医疗设备等领域。
而不同用途的 Stewart-Gough 平台构型设计也不同,作为隔振平台时,一般会选择 3-3 结构形式(上下各三个连接支点),该结构形式的特点是各支路之间正交,有利于运动解耦、以及对机械手的控制。
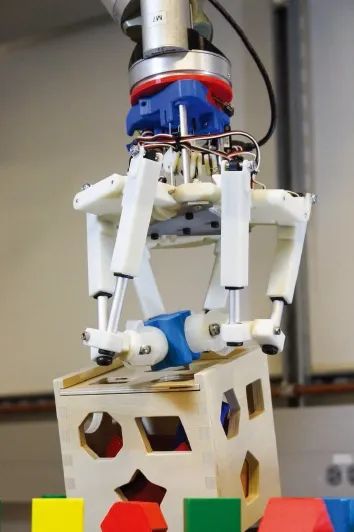
图 | 基于 Gough-Stewart 构型 6 自由度机械手(来源:IEEE Robotics & Automation Magazine)
构型设计
在本次研究中,哈佛大学的康纳·麦肯(Connor M. McCann)等人基于 Gough-Stewart 3-3 构型研究出了机械手,该机构由三个连杆手指和六个驱动器组成。每个手指由一个平面连杆,一个旋转关节(转动副)和一个球形关节(球面低副)组成。
为了避免产生冗余的约束,该机构还搭配了浮动滑轮差速器,差速器将这三个关节连接到旋转驱动器上。当要抓取物体时,只需要控制旋转驱动器的扭矩值就可实现。因此,机械手的所有操作都是基于六个驱动器的运动。
为了实现闭环控制,该团队安装了电位计传感器用于测量机械手指根部旋转关节的角度,以判断所抓取物体的形状和大小,从而可以通过向驱动器发出位置指令来执行抓取操作,以实现闭环控制。
构型优化
为此 Gough-Stewart 平台的结构形式直接影响到机械手的工作空间、运动性能以及静态特性等。研究人员对机械手的手掌半径值、球形关节法向偏移量、手掌平面中测量的手指基角值、和驱动器行程 4 个变量进行了寻优参数组合设计,最终确定了最优的参数组合,并且在仿真实验中获取了机械手运动空间包络图。

图 | 机械手的运动空间(来源:IEEE Robotics & Automation Magazine)
拿捏实验
在完成优化设计后,为了测试机械手的性能,研究人员对其进行了抓取实验研究。在实验中,机器人抓取规划的目标是在机器人手和待抓取物体的构型空间中寻找合适的接触点,实现稳定的抓取操作,而选择不同的抓取对象有利于评估不同的尺寸和形状对于机械手的抓取效果。
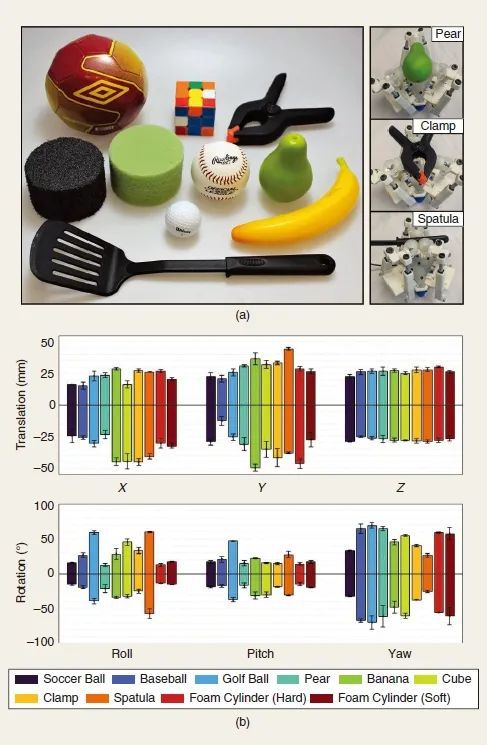
图 | (a)机械手抓取的目标对象;(b)机械手在抓取不同对象时的运动范围(来源:IEEE Robotics & Automation Magazine)
在实验准备阶段,研究人员倾斜放置立方体盒子以增加操作任务的复杂性,盒子中的孔相对于相应的形状块间隙很小,因此需要在插入木块之前将木块和孔进行精确对齐。
在实验中,研究人员需要根据机械手的运动姿态来控制机械手抓取木块,人为地控制木块定位在立方体盒子上方,从而操作机械手将四种形状的木块插入到各自形状的孔中,进一步说明了此类型的机械手可以抓取多种形状不规则物体。
此外,研究人员还进行了小球迷宫玩具实验,通过操控机械手来调整迷宫的空间姿态,从而让小球从迷宫入口到达出口。

动图 | 机械手抓取不同物体(来源:IEEE Robotics & Automation Magazine)
概括来说,由于其具有高分辨力、大刚度和很强的稳定性,基于这种构型的机械手有望用于医疗设备,同时有助于将并联机构应用在机械手的设计。对比于传统的昂贵的工厂机械臂,这种类型的机械手可以执行更灵巧的任务。