毫无疑问,数字化是当今社会发展最主要的主题的之一,目前已有的千行百业都可以结合数字化升级重新做一遍,这就是产业升级。
而从数字化这个名字就可以听出,“数据”是数字化的核心,而众多的数据中,空间位置数据是一个最基本的维度,这是定位技术产业发展的基础逻辑。
但如果你真的想从事定位这个行业,那么就会知道,原来定位技术的种类有这么多!且每种定位技术都有自己的优缺点。
尤其是目前市场环境之下,融合定位方案无论在C端的消费产品还是在B端的行业应用方案中,逐渐成为主流,因此,想要做好定位产业,就需要对市场各种定位技术都有一定的了解与认知。
第一个维度:从是否需要有定位基础设施投入的角度来分,可以分为两种:需要有基础设施以及点对点定位测距。
本文梳理汇总了市场上主流的定位技术。
01UWB
技术介绍:
UWB(Ultra Wideband)是一种无载波通信技术,利用纳秒至微秒级的非正弦波窄脉冲传输数据。
2002 年,美国FCC(美国联邦通信委员会)正式将 3.1 GHz- 10.6 GHz 频带作为室内通信用途对UWB 开放,标志着 UWB 开始用于民用无线通信。
在中国,2023年初,工信部无线电管理局发布了《超宽带(UWB)设备无线电管理规定(征求意见稿)》,根据新版《规定》,未来国内UWB技术的使用频段为:7235-8750MHz。
UWB有三大能力:
1、通信
作为一种通信技术,UWB的特点有:传输数据大,可达几百Mbit/s、传输距离可达上百米,不过传输距离远了之后传输能力会大幅衰减、安全性能高,对一般通信系统而言,UWB 信号相当于白噪声信号,很难被其他设备所获取。
2、雷达
UWB作为雷达技术源具有的特点有:UWB具有较高的空间分辨能力、使其具有较强的目标识别能力等,可用于短距离雷达,车载活体检测等。
3、高精度定位
UWB作为一种高精度定位能力其特点有:精度高,定位精度可达厘米级,这是目前市场上以射频信号做定位源定位精度做高的几乎,其次还有容量大,相较于其他的无线定位技术,有更大的容量,时延低等特点。
UWB定位算法有三类:
1、ToA(或ToF)
TOA 通过分别测量移动终端与三个或更多基站之间信号的传播时间来定位,它采用了圆周定位。

2、TDOA
TDOA 是基于到达时间差定位,系统中需要有精确时间同步功能。
时间同步有两种,一种是通过有线做时间同步,有线时间同步可以控制在 0.1ns 以内,同步精度非常高,但由于采用有线,所有设备要么采用中心网络的方式,要么采用级联的方式,但增加了网络维护的复杂度,也增加了施工的复杂度,成本升高。并且,系统中还有一个专用的有线时间同步器,综合价格比较昂贵。

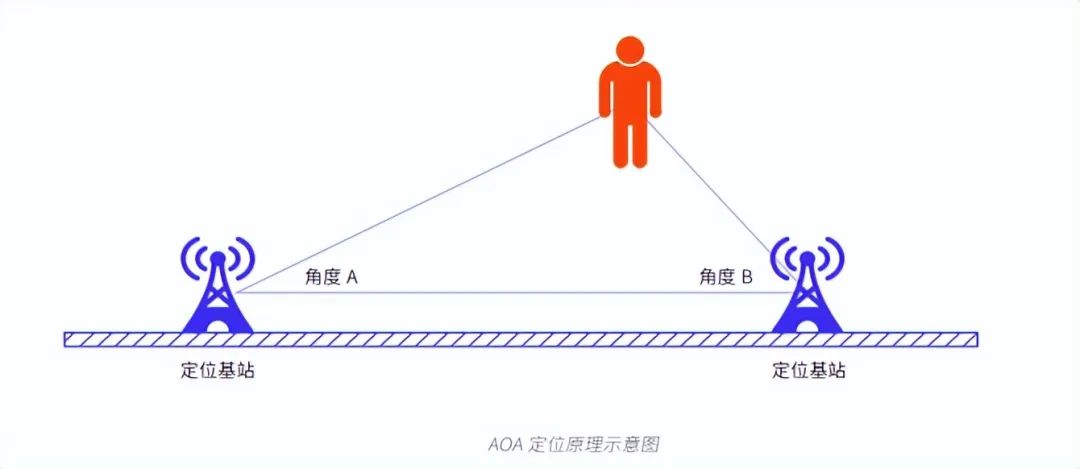
3、AOA
AOA 定位一般是基于相位差的方式计算出到达角度,一般不单独使用,由于 AOA 涉及到角度分辨率的问题,若单纯 AoA 定位,若离基站越远,定位精度就越差。
市场介绍:
目前,UWB定位技术正多点开花,我们将UWB定位市场分为了4大类:
第一类市场:IoT企业级应用。包括化工厂、发电厂、煤矿、公检法司、仓储物流等等。
第二类市场:IoT消费级应用。包括各种加入了UWB芯片的智能硬件,比如电视遥控器、宠物项圈、寻物Tag、智能机器人等。
第三类市场:汽车市场。典型的产品就是汽车数字钥匙等。
第四类市场:手机市场。就是手机里面加入UWB芯片。
02BLE(低功耗蓝牙)定位技术
BLE定位技术是指用BLE做信号源从而实现定位功能,根据其定位方式的差异,可以分为四类。
第一类:蓝牙AoA/AoD定位
蓝牙5.1标准引入了AoA和AoD的角度定位算法,通过蓝牙设备感知发射节点信号的到达/发送方向,计算接收节点和发射节点之间的相对方位或角度,定位精度可以做到亚米级(1m以内)。
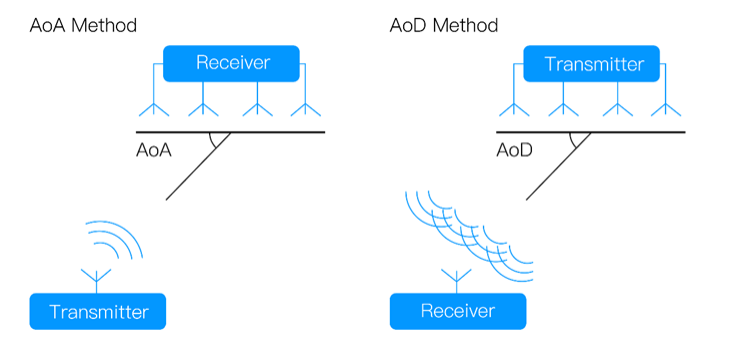
AoA与AoD技术示意图
AoA是利用单一天线发射寻向信号,而接收终端内置天线阵列,当信号通过时,会因阵列天线接收的距离不同而产生相位差,进而计算出信号的方向。
AoD则正好相反,由具备阵列天线的设备来发射信号,传给单一天线终端,接收终端可以通过接收到的信号计算出来波的方向,进而实现定位。
第二类:蓝牙Beacon定位
蓝牙Beacon是基于RSSI(信号强度)做定位,不同于网关单基站定位,蓝牙Beacon的方案是三边定位,即通过三个(及以上)基站交叉测算出更为精准的位置信息,精度范围在1-3m之间。
第三类:消费类点对点定位产品
所谓点对点定位产品指的是以手机为核心,不需要布置定位网络,只需要被定位的产品与手机进行连接即可。
其定位原理包括了蓝牙RSSI与AoA,因为RSSI与AoA现在基本都是蓝牙芯片的标配,具体到产品到底有没有AoA,最主要的是看有没有加AoA天线。
而以手机为核心的点对点蓝牙定位场景最有代表就是寻物Tag以及汽车钥匙。
第四类:蓝牙网关房间级定位
即核心设备是蓝牙网关,通过蓝牙网关,结合RSSI做到房间级别的定位,这个方案非常适合资产管理场景。
因为一般的企业库存或者重要的资产管理只需要做到房间级别的精度就够了,而如果要管理的设备数量不是特别大的话,采用蓝牙网关定位是成本最低的方案。
而根据我们调研了解,BLE还有第五类定位技术,其标准预计会在未来几年之内正式发布,本文也对其进行提前预告:
第五类:蓝牙信道探测(Channel Sounding)
BLE CS提供一种相位测距 (PBR:phase‑based ranging)方案,主要用于两个 BLE 设备之间的高精度距离测量 (HADM: high accuracy distance measurements)。
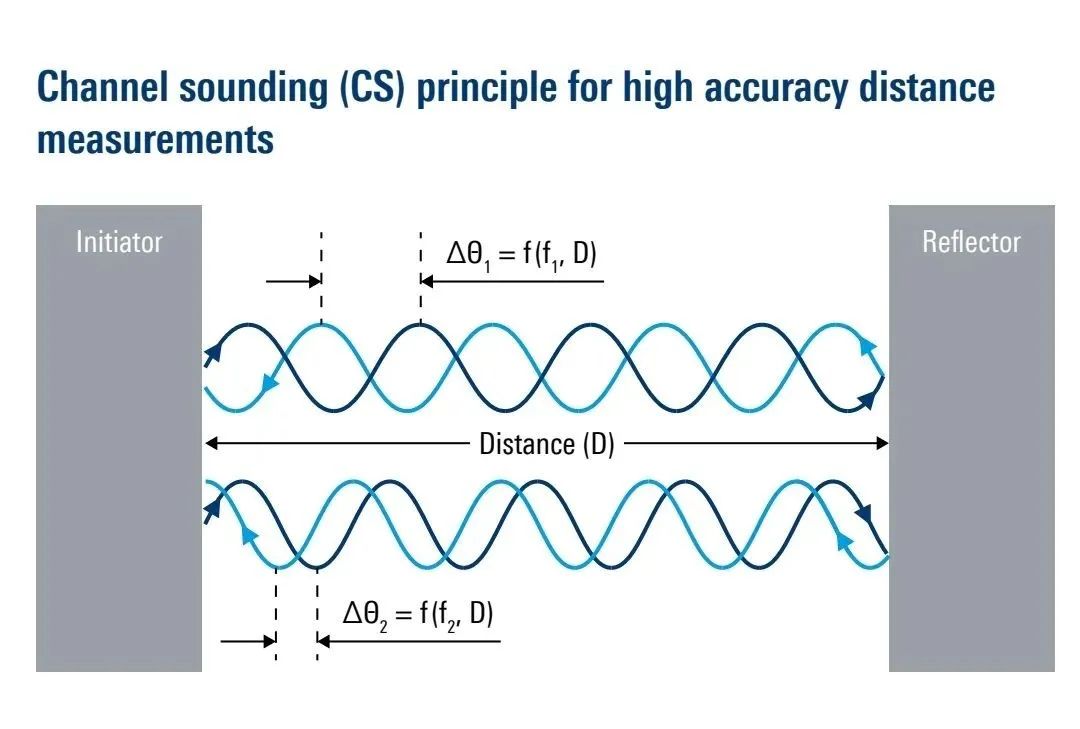
在频率f上,PBR测量信号通过距离D传播时的相移来计算距离的。当使用两个或多个不同频率的信号时,可以测量信号之间的相位差来测算距离。
当使用信道探测估计距离时, 一个设备启动程序(initiator), 第二个设备在不修改相位的情况下重复信号传输(reflector)。
对于频率为fi 的每次传输, initiator测量发射信号和接收信号之间的相位变化。
未编码的窄带恒定包信号可以使用单个天线发送或接收,以便支持标准低功耗蓝牙芯片。
035G定位技术
5G定位即用5G信号实现定位功能的技术,其核心思想是复用当前的5G基础设施,而不增加额外的布网成本,从而让5G在实现高性能连接能力的基础之上,再增加较高的精准定位能力(定位精度亚米级)。
从5G定位原理的角度来看,定位技术大致可以分为三种类型:基于三角关系和运算的定位技术、基于场景分析的定位技术和基于临近关系的定位技术。
基于三角关系的定位技术
这种定位技术根据测量得出的数据,利用几何三角或双曲线关系计算被测物体的位置,它是最主要的、也是应用最为广泛的一种定位技术。
基于场景分析的定位技术
这种定位技术对定位的特定环境进行抽象和形式化,用一些具体的、量化的参数描述定位环境中的各个位置,并用一个数据库把这些信息集成在一起。业界习惯上将上述形式化和量化后的位置特征信息形象地称为信号“指纹”。观察者根据待定位物体所在位置的“指纹”特征查询数据库,并根据特定的匹配规则确定物体的位置。
基于临近关系的定位技术
基于临近关系进行定位的技术原理是:根据待定位物体与一个或多个已知位置参考点的临近关系来定位。这种定位技术通常需要标识系统的辅助,以唯一的标识来确定已知的各个位置。这种定位技术最常见的例子是移动蜂窝通信网络中的Cell ID。假设待定位物体分别位于三个Cell中。由于各个Cell中参考点的位置已知,所以根据待定位物体所在Cell可以粗略确定其位置(即Cell中参考点的位置)。
04声波定位技术分析
基于音频信号的室内定位技术,具有成本低、精度高、兼容性好的特点,非常适合消费级智能手机的室内定位场景。直接使用智能手机内置的麦克风,无需增加额外的设备。
可扩展至智能手机的音频定位系统可以大致分为两大类:基于音频信号 TOA 和 TDOA 的定位系统。
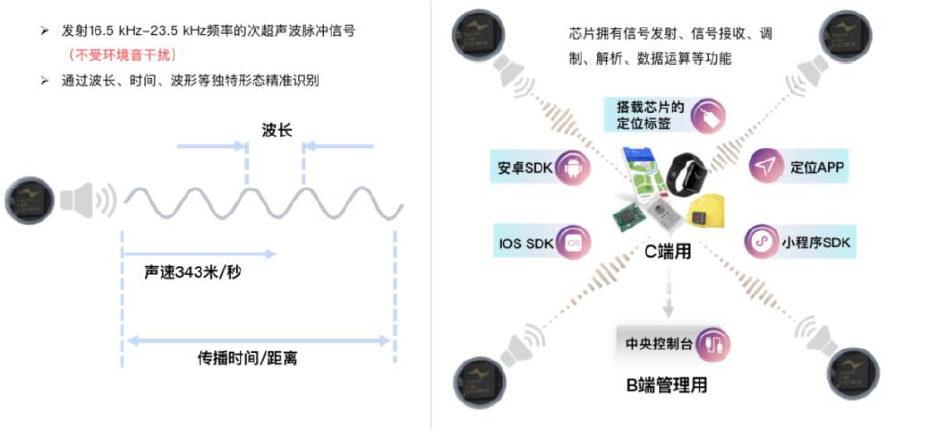
音频定位原理
基于音频的室内定位技术利用声学器件如麦克风、扬声器实现定位具有如下特点:
1、精准定位:定位精度可达分米级(0.5-1m);
2、维护方便:基站通电即可用,单基站可覆盖 30-50 米 ;
3、由于音频的传播速度远低于射频,实现高精度的音频定位对时钟的同
步精度要求不高;
4、对于位置服务提供商,虽然实现音频定位需要在室内布设音频节点,但由于商用音频元器件的成本低廉,有望通过低成本的基础设施投入,实现室内的高精度定位(分米级);
5、对于用户,麦克风和扬声器是手持智能移动终端的标配,可在无需用户额外开销的情况下提供高精度的位置服务;
6、不限用户容量:采用类似卫星导航系统的广播模式,基站和终端无需交互,不限用户容量;
7、数据安全:终端侧解算,基站不主动扫描用户信息。
05室内北斗定位技术分析
室内北斗顾名思义,就是在室内有遮挡环境中的北斗卫星定位技术。众所周知,目前全球几大GNSS定位系统已经很完善,但是GNSS有个致命的弱点,就是地面如果有遮挡就没有信号,在这样的市场条件下,在室内定位场景中的北斗定位技术(也叫伪卫星)就应运而生。
大致原理是在室内场景模拟真实导航卫星信号,让所有的卫星导航终端实现在导航卫星信号盲区(室内、地下、隧道、高架下等)的定位导航,在同源信号下实现无缝衔接室内外导航系统,实现室内外一体化高精度定位导航。
主要的产品有:北斗卫星微型基站及配套天线,标签产品与现有的北斗终端产品完全复用。
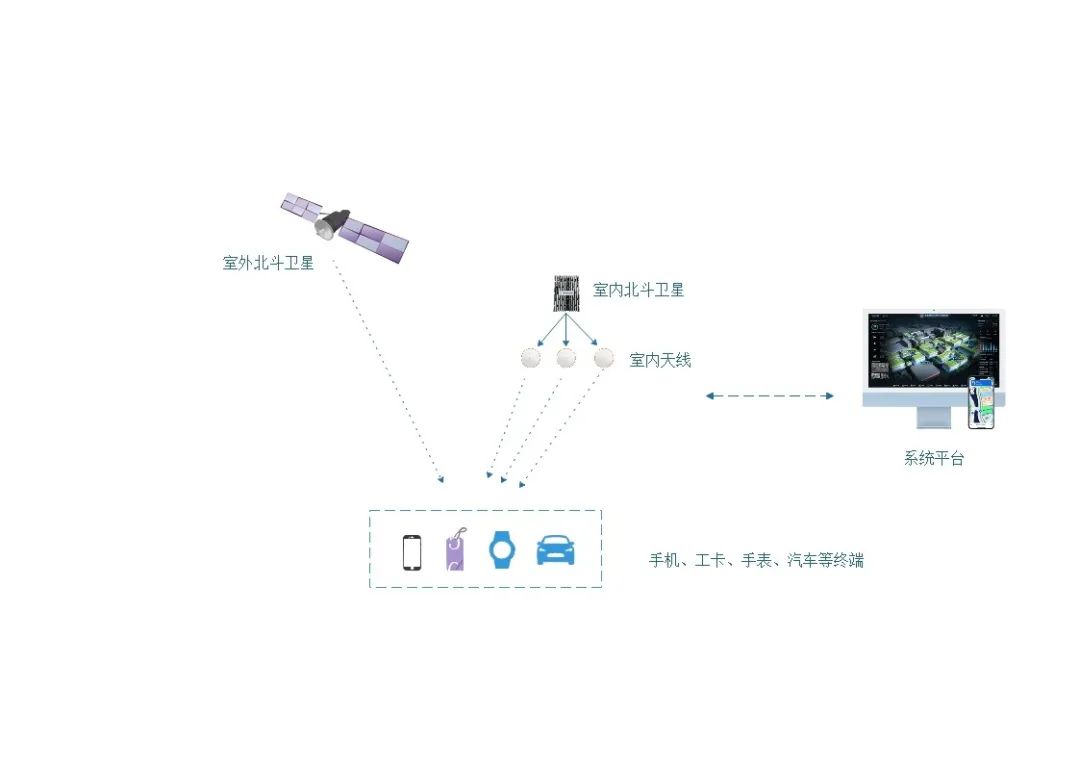
室内北斗技术原理图
06地磁技术分析
地磁场在地球近地空间连续分布,受地球磁性物质分布不同,各个地域的地磁场存在差异。地磁场已广泛应用于舰船和飞机的方位导航,利用指南针、磁罗盘等测量地磁场方位信息,以获得稳定的地球北指向。
与磁航向测量技术不同,地磁定位技术利用地磁场强度随地理空间位置变化具有不同分布的特性,实现对运动载体的定位。通过安装在运动载体上的磁场传感器,实时测量运动航迹(轨迹)上的地磁场数据,并提取磁场特征,与事先获得并存储的地磁场模型或地磁图进行匹配,以确定运动载体的实时位置,用于导航或者定位跟踪。
因为地磁场的广泛分布,地磁定位技术可以应用于飞行器、地面车辆、水下潜航器等不同的运动载体,特别在建筑内等封闭空间内,除了地球磁场外,人工建筑的铁磁性材料进一步丰富了地磁场的空间分布特征,使磁场的空间差异分辨率可达到10cm,为室内位置测量提供了一个天然的坐标系。
在使用磁场定位技术前,需要采集定位区域的磁场分布,并把采集过的磁场分布制作成地磁图;当来到有地磁图的区域时,通过运动体携带(或安装)定位终端内的磁传感器,测量运动体经过区域的磁场,将实际测量的磁场数据与已知的地磁图进行对比,在地磁图内找到和测量磁场数据最相似的数据所在的位置,即是运动体所在的位置。
从上述定位原理看出,地磁定位的最大优势是不依赖于外部环境、不需要事先部署硬件、不需要维护、可以分辨楼层、不易受遮挡和干扰,能够取得定位精度、成本、可靠性和兼容性的良好平衡,具有非常广阔的市场应用前景。
但是,要实现稳定高精度的地磁定位性能,并不是一件容易的事情,除了需要重点考虑四个方面的因素:第一,地磁图的制作和定位特征的应用;第二,选择适合的磁传感器;第三,与磁传感器和运动载体相适配的实时测量方法;第四,与应用场景和运动载体相适配的定位算法。
07Wi-Fi定位技术分析
Wi-Fi指纹定位原理:
基于Wi-Fi指纹的定位,其主要思想是将难以直接测量的位置信息与容易直接测量的Wi-Fi信号,形成一种映射关系。主要基于以下两个基本假设:
第一:无线信号指纹特征与地理位置相关。理想情况下,Wi-Fi覆盖的室内环境中每一个地理位置中的无线信号指纹特征都是唯一的,可以用来进行位置区分。Wi-Fi指纹的差异性越大,定位系统的定位精度就越高。理想情况下只考虑Wi-Fi指纹特征与位置信息的关系,而不考虑人员的移动、温度的变化、移动终端的差异以及采样时间等因素对Wi-Fi指纹的影响。
第二:不同采样点之间的Wi-Fi指纹的匹配度与它们之间距离的远近具有很大关系。在离线训练阶段,采集部分特定参考点的Wi-Fi指纹,由于采集的Wi-Fi指纹数量有限,不可能覆盖所有的室内位置,在在线定位阶段,用户的位置也不会正好处于采集的离线指纹中间,因此需要利用近邻参考点来估计用户的位置。无线信号的衰减特性,可以保证相邻位置的无线信号差异不会太大,但是在具体的室内环境中,由于墙壁的阻隔、人员的移动、信号传播的多径效应等因素的影响,也可能出现实际位置相近的两个指纹,但它们的匹配度很低,或者实际位置比较远的两个指纹(比如处于不同的楼层),它们的匹配程度却比较高。
基于Wi-Fi指纹的定位算法原理如图所示。
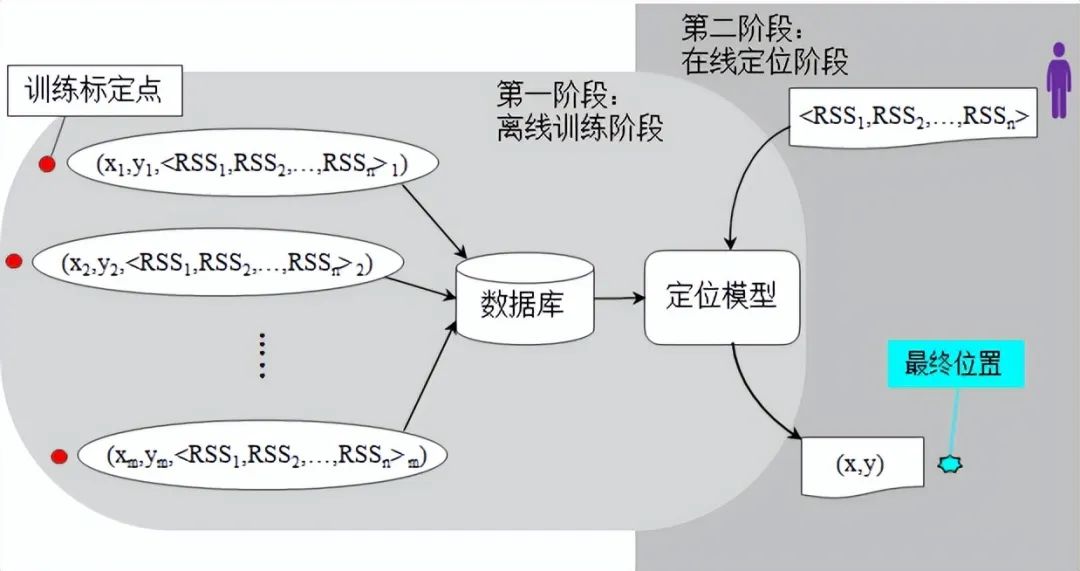
Wi-Fi指纹定位算法原理图
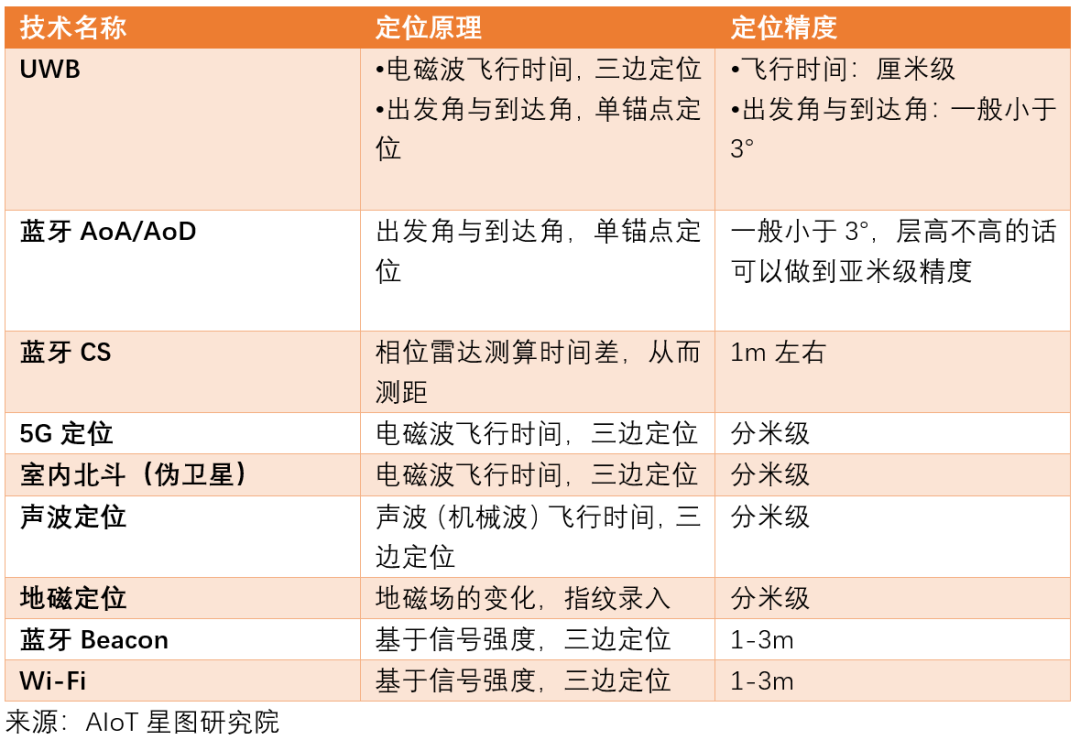
前面较为详细的介绍了市场上常见的高精度定位技术,为了方便读者汇总与记忆,我们将每种定位技术的优缺点做成了一个汇总表格:
常见的高精度定位技术介绍表
08重磅报告发布
虽然已经尽量精简内容,但不知不觉篇幅已经超过5000字,读者朋友想要更全面的了解中国高精度定位产业,欢迎关注由AIoT星图研究院出品《2024中国高精度定位产业白皮书》的线上发布会,3月20日 14:00,我们将会免费发布这份白皮书。
此外,4月25日将会在IOTE 2024国际物联网展上海站上举办一场“高精度定位技术与应用生态研讨会”,本次大会将会线下发布《2024中国高精度定位产业白皮书》,同时,大会将会邀请《2024中国高精度定位产业白皮书》的参编单位:北京瀚巍微电子技术有限公司、长沙驰芯半导体科技有限公司、深圳捷扬微电子有限公司、芯百特微电子(无锡)有限公司、北京智联安科技有限公司、郑州联睿电子科技有限公司、深圳云里物里科技股份有限公司、深圳市昇润科技有限公司。
这些企业将会分享UWB、BLE、5G等高精度定位技术最前沿的技术与应用突破,对于听众朋友来说这也是一场认识大咖、寻找资源、加入高精度定位产业圈的机会,欢迎业内伙伴莅临现场,共襄定位生态盛典!