Uber测试车为什么会撞死行人?美媒The Information,挖掘了许多来自Uber内部的声音,其中最引人注意的是:只在意路测,忽略了模拟器上的测试。
相比之下,今年Waymo在欢庆自动驾驶里程达到5百万英里的同时,也提到了模拟器的里程数,那是翻越几个数量级的50亿英里。
不只是Waymo,许多开发自动驾驶技术的公司,都把模拟测试放在最高优先级。
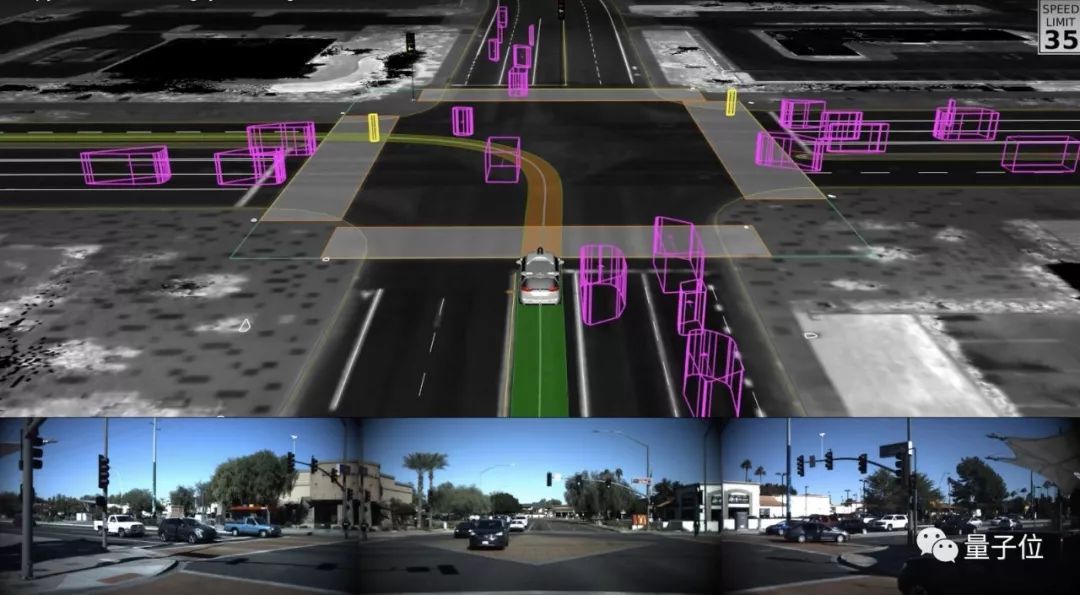
△Waymo自动驾驶的虚拟世界
而像Uber这样,在坦佩事故发生之后,才开始大规模开展模拟器测试,确实有些令人惊讶。
毕竟,模拟器存在的意义,就是让自动驾驶汽车在上路之前,暴露出大大小小的问题,以便改进系统,提升自动驾驶的安全系数。
为何Uber自动驾驶的模拟测试一直是龙套?内部人员给出了一些苦涩的原因——
不肯花时间?跑在自动驾驶出行服务(Robo-taxis) 的赛道上,Uber急于推出自家的无人出租车 。
整个自动驾驶团队,都处在“今年一定要落地”这样紧迫的节奏之下。
可是,模拟器测试非常消耗时间。攻城狮们需要下大功夫,给自动驾驶汽车建造一个五花八门的世界,让它在里面经受各种路况的考验。
而Uber团队里,并没有太多这方面的行家,构建一个好用的模拟系统,无论从时间还是人力来看,可能都有些奢侈了。
于是,在高层的决策上,Uber从一开始就没有重视起模拟器来。
又不肯花钱?谈到人力,据知情人类透露,Uber模拟测试组的攻城狮,比部门里其他的攻城狮,工资都要低。按年薪算,甚至可以相差几万美元。
如此差别对待,是很难吸引厉害的攻城狮,投入模拟器开发的。
就连本组小伙伴,也纷纷想要转去其他组。
这个问题,直到今年年初才有了改善。死磕模拟器的人们,终于争取到了和其他组同等的待遇。
而致命事故的发生,停掉了所有路测,让模拟器变成了更加重要的练兵场,可能也让这个小组看到了一些希望。
不过,即便有了外部条件的刺激,模拟系统的进展,还是绕不开内部的难题。
捞也捞不起来?2015年,Uber从卡耐基梅隆大学 (CMU) 挖来半个机器人部门,启动了自动驾驶项目。
这支团队写过一个模拟软件,那是以土木工程师用来规划城市交通的程序为基础,写成的。
不过,后来加入团队的攻城狮,都觉得那个软件没什么用。
2016年,Uber自动驾驶团队来了一个新的负责人,叫做Anthony Levandowski,姑且称他莱万。
莱万的自动驾驶卡车公司Otto,被Uber收购了。
在那之前,他还曾经在Waymo服务过。前文也提到,那里的模拟器工作很有成效。
莱万试图推动公司,在模拟测试上投入更多一点。但他和Uber老人之间存在分歧,或许也是模拟系统开发在Uber遇到的一个阻碍。
如今Uber用的模拟器,还是在他离职之后才出生的,和3年前很不一样。
△Unreal上的塞尔达
不能愉快地玩耍?这个模拟测试系统,依托于游戏引擎Unreal,目标是测试一些特定的操作——
比如超车,比如在没有左转信号灯的路口左转等等。里面的场景可以有千千万万,比汽车在现实中能遇到的情形丰富得多。
系统要摄取的,除了非常详细的道路数据,还有其他机动车、自行车和行人的动态信息。
听上去很幸福,但问题在于,自动驾驶核心团队,写的代码,有时候和模拟程序并不兼容。
△真·插不进去
这样的话,模拟测试推进起来就有难度。
模拟测试组的人类也曾经恳请核心团队,写写能兼容的程序,但对方似乎也很忙,抽不出太多时间来管这个。
直到现在,模拟器也没有跟核心系统,达成顺滑的配合。
于是,即便模拟系统想要给Uber的自动驾驶提供更大的帮助,可能也是有心无力。
那现在呢?既然,不能去公开路段测试,且模拟测器地位依然尴尬,现在Uber就把更多的注意力,放在了私人路段的测试上。
毕竟,Waymo已经在亚利桑那州,跑起自己的无人的士了。Uber早在2016年启动的Roadrunner计划,也要加快步伐才行。
不过,真的不是只有路测才重要,几十亿英里的模拟器测试也重要。