软机器人的问世通过采用完全软体系统,可与任何随机表面安全交互,同时提供出色的机械柔韧性,在机器人,可穿戴设备甚至制造工艺方面取得了巨大进步。此外,软机器人技术的最新发展涉及透明软致动器和传感器的进步,这些进展使得能够构造能够以视觉和机械上畅通无阻的方式工作的机器人,从而协助了机器人的操作并在各个领域创造了更多的应用。在这方面,主要由光学透明的不可感知的硬件组件组成的不可感知的软机器人有望在即将到来的软机器人时代构成新的研究重点。最近,首尔国立大学Seung Hwan Ko教授团队论述了有关扩展的不可感知的软机器人技术的最新进展,包括不可察觉的透明软机器人(透明的软致动器/传感器)和不可察觉的非透明伪装蒙皮。讨论了它们的原理,材料选择和工作机制,以便可以探索难以察觉的软机器人系统中的主要挑战和观点刊发相关题为‘‘Transparent Soft Actuators/Sensors and Camouage Skins for Imperceptible Soft Robotics’’的论文在《Advanced Materials》上。

【图文解析】
1.引言
机器人和可穿戴设备的技术进步取决于光学和机械合规性,具体取决于它们的用途。通过利用透明执行器和传感器的最新进展,将其柔软而有弹性的机械柔韧性与光学透明性相结合,可以创造出一类新型的软机器人,可以称为不可感知的软机器人(ISR)。如图 1所示机敏的软机器人系统图描述了ISR将主要由透明系统和迷彩皮肤组成。透明系统包含光学透明的软致动器和传感器,以构建别人很少见的机械交互机器人。

图1 不可感知的软机器人(ISR)的系统图。ISR机器人领域的各种潜在应用:人类辅助设备,机器人假肢和软卧底机器人。
2.透明软致动器
为了使机器人能够自由移动并与环境互动,机器人的身体需要产生各种运动的致动系统。软致动器,直觉上是指“软”一词,它必须具有与常规笨重且刚性的致动器不同的,可靠地顺应于任何表面的软主体。
2.1 电热致动器ETA
长期以来一直是原始能源的热量一直是软机器人技术最新发展的有效激励手段。由于致动器内部传递的热量是肉眼看不到的,因此透明的ETA可以被认为是对不易察觉的致动系统非常直观和实用的方法。图 3a会显示一个基于LCE的透明执行器,该执行器由插入两层松散交联的LCE膜之间的薄的可拉伸蛇形电阻加热器组成,以建立基于ETA的人造肌肉。
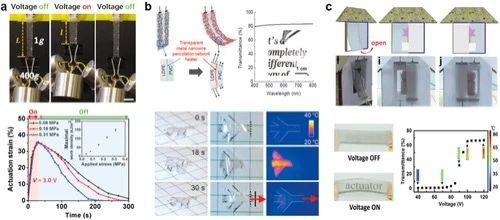
图3 透明电热执行器(ETA)。a)基于热响应液晶弹性体(LCE)的人造肌肉膜,具有可逆的驱动和热机械性能。b)与NW加热器和各向异性聚合物薄膜以及透明行走机器人集成在一起的双层透明致动器,其红外图像相对于DC图像具有可视化的运动效果。c)使用PW-PDMS / SACNT复合材料的透明可切换执行器,以及在不同的温度条件下通过施加电压可切换的光学透明度。
2.2 介电弹性体致动器DEA
DEA是一种致动器,使用高压驱动的强电场使夹在两个主电极之间的电介质材料变形。在先前关于DEA的工作中,通常由碳粉或碳脂制成的顺应性电极不具有光学透明性和较高的机械耐久性。
DEAS通常显示快速致动速度,大的应变,和高的力的产生,近期通过凯普林格和同事的工作已经利用这些性质在液压扩增自愈静电致动器实现使用拉链机构快速致动(图 4a)。通过将聚丙烯酰胺(PAM)水凝胶注入通过热压两个热塑性薄膜形成的通道中,可以轻松制造HASEL执行器。HASEL执行器具有出色的执行性能,可产生高达118%的应变,应变率约为7500%s-1,激励频率为126 Hz,比功率为156 W kg-1。HASEL执行器的形状可以很容易地设计成蝎尾(图 4a,底部),类似于真实蝎尾的高速冲程,其完全卷曲后的快速驱动速度为1.26 m s-1。
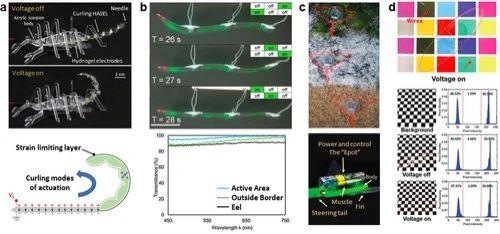
图4 透明介电弹性体执行器(DEA)。a)蝎子机器人中的液压放大自修复静电(HASEL)致动器,并描述了使用液体介电材料的拉链驱动DEA。b)模仿透明鳗鱼的流体电极介电弹性体致动器(FEDEA),并比较FEDEA和鳗鱼(小脑)的光学透明度。c)具有所有透明层和船上系统的电子鱼,用于供电和远程控制。d)透明的软机器人,其具有双轴预拉伸膜和在驱动下无光散射的表面。
2.3 替代促动
除了DEA,的ETA,还存在其他类型的透明软的致动器的具有替代致动诸如气动/液压致动器,和功能性复合材料的致动器。虽然气动致动器软一般要求的压缩空气的外部源施加由所述阀系统,它们具有高输出力的优势并保持其形状,而不额外输入能量。由功能复合材料制成的软促动器通常不依靠电力,而是利用诸如湿度,pH和周围温度等环境刺激。
除了气动致动器,Yuk等人还介绍了液压驱动执行器。透明坚固的水凝胶表皮,因为液压腔可承受1000次以上的液压驱动操作,而不会发生泄漏或故障。由于液压腔主要由水组成,因此所提供的执行器在水中具有几乎相同的光学和声音特性,从而使整个系统从水生环境中消失(图 5a)。通过这种伪装功能,演示了透明的机器人鱼,手指和抓手,显示出了无法察觉的运动的优势(图 5a,底部)。结果,由坚硬的水凝胶组成的液压执行器已证明在任何其他透明的软执行器中显示出最高的输出力(10 N)。
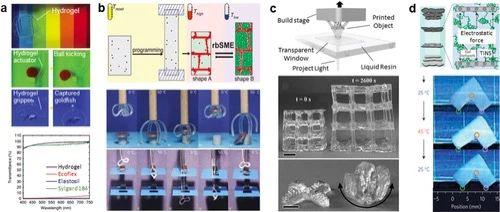
图5 透明软执行器中的替代执行类型。a)液压执行器及其光学特性。在水生环境中,透明的机器人鱼,手指和主要由水凝胶制成的抓取器被伪装起来,以展示出感知运动的优势。b)可响应的双向形状记忆效应(rbSME),可响应编程的温度,并通过rbSME演示透明的软抓手。c)离子复合水凝胶的3D打印和渗透驱动。d)静电各向异性水凝胶的介电常数转换和加热/冷却时L形水凝胶致动器的位移曲线促进了热响应致动。
3.透明的软传感器
为了感测外力或发出用于控制机器人的信号,软传感器已经在电子皮肤和软机器人领域进行了许多研究。这些领域的许多同事已经提出了各种方法,以将多种感知融入柔软而富有弹性的特征中。
3.1启用图案化的透明软传感器
尽管材料的固有刚度通常会限制应变伸长率,但是具有极薄厚度的电子产品可以很好地与曲线和动态表面相接,从而在无法感知的电子皮肤功能以及机器人感知方面取得了长足的进步。通常厚度在几微米到300 nm之间的超薄薄膜电子产品具有超轻和无阻碍的物理特性,建立了难以察觉的触觉传感器阵列和PLED,可以以皱纹或皱折的方式贴合皮肤,而不会影响性能(图 6a) 。
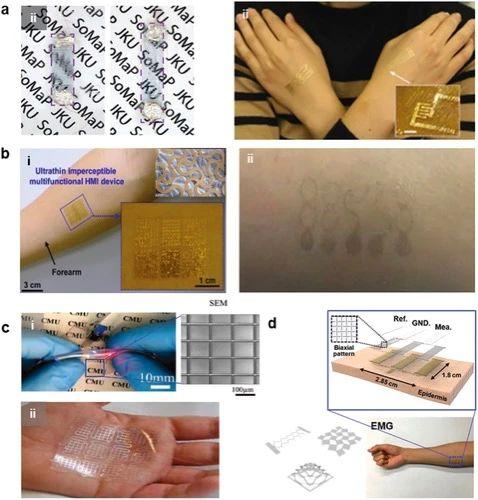
图6 图案化使透明的软传感器成为可能。
3.2本质透明的软传感器
在制造透明的软传感器时,许多导电材料(例如金属和碳)通常会受到刚度,脆性和不透明性的限制。但是,在开发用作透明软传感器的本质上柔软且可拉伸的材料方面已经取得了很大的进步。在本节中,将讨论以各种方式设计的本质透明的软传感器。离子蒙皮是由松散交联的聚合物链制成的离子导电透明传感器,该链充满水或其他离子液体(图 7a)。
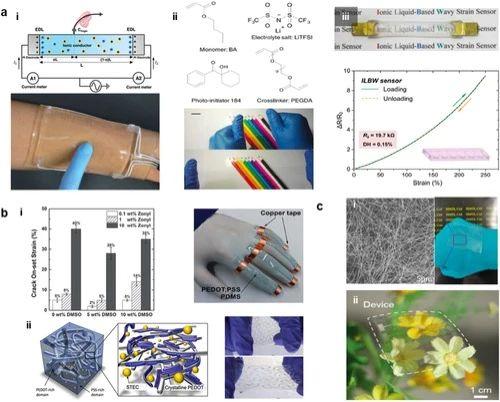
图7 本质上透明的软传感器。
4 通过伪装的假象
可编程迷彩系统可以成功替代透明材料。通过改变它们的皮肤颜色和形态来模仿它们的周围环境,可能无法察觉这些结构。最早的伪装软机器人是由哈佛大学和国防部高级研究计划局(DARPA)的科学家创建的,该机器人能够将其肤色调整为背景,甚至隐藏在红外区域。气动软机器人内部的着色元素由开放式微通道提供。如图 8a所示,当机器人向岩石移动时,它会主动伪装。通过将高导热性的材料注入通道,软机器人还具有红外伪装的能力。
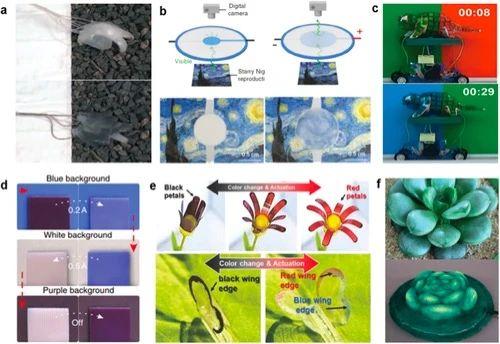
图8 可伪装皮肤材料的进步。a)注入颜料而伪装的软机。b)受头足类动物启发的可伸展多式联运迷彩平台。c)通过电沉积金和纳米阵列的等离子体光谱特性,使皮肤发生主动变色。d)具有热致变色弹性体皮肤和嵌入式液态金属加热器的可拉伸变色皮肤。e)仿生致动器的同时各向异性和变色致动。f)模仿周围环境的可编程机器人组织。
5 当前的挑战和观点
透明传感器,致动器以及可挠性皮肤的最新发展带来了各种策略,使得集成式感知系统的开发成为可能,该系统在各种应用(如卧底操作和可穿戴辅助设备)中具有巨大潜力。 尽管最近进行了所有改进,但仍有许多实际工作要做。 我们可以预见到传感器和执行器的集成,通过各种化学和生物能源的自供电自动化以及通过与机器智能的集成将传感器信号识别的新水平。 我们对不可察觉的软机器人技术进行进一步开发的观点将包括以下内容(图9)。
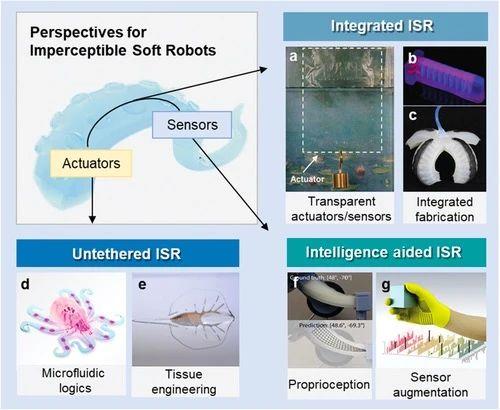
图9 从解决当前目标到解决当前问题的不可感知的软机器人技术(ISR)的观点。
【陈述总结】
软致动器和软传感器中新材料和设计开发的最新进展旨在通过将两个相似的研究领域(软机器人技术和可穿戴设备)融合在一起来推动产生新技术要求的最终目标。在此,我们通过介绍其三个主要硬件组件(透明的软致动器和传感器以及迷彩皮肤)中的最新技术,并介绍了隐身的重要性,介绍了一种新型的隐身软机器人(ISR)。一类新的应用程序,例如可秘密操作的软机器人,辅助设备,软机器人假肢以及人机交互可穿戴设备。同时有效地理解当前软机器人系统中的优势和当前挑战已导致对电子皮肤的现有技术的补充实施,并进一步朝着向软机器人领域中的新型应用程序范式转变发展。这些进步将包括透明软功能材料的不断发展,以及在传感,驱动和伪装皮肤整合方面的新策略,以实现先进的光学和机械感知性能。